Uber Freight presenta en Deliver el primer programa de socios de diseño del sector
septiembre 11, 2024 / US

Por: Mudit Gupta, Sr. Científico de Datos; Mohit Gulla, Científico Aplicado; y Angelo Mancini, Director de Ciencia Aplicada.
En el sector logístico, saber cuándo una carga se retrasa es fundamental para mitigar los malos resultados del servicio. Previo aviso, Uber Freight puede trabajar con el transportista y el expedidor para mitigar el impacto de una llegada tardía. Sin embargo, las llegadas tardías suelen detectarse demasiado tarde para poder realizar ajustes, o no se detectan hasta que la hora de la cita ya ha pasado.
En Uber Freight, nuestro sistema de seguimiento está diseñado para proporcionar un servicio de la más alta calidad a los transportistas. Combinando nuestros datos internos de seguimiento con nuestro profundo conocimiento de la logística y nuestra experiencia en aprendizaje automático, hemos desarrollado un sistema que refina continuamente nuestros datos sobre la ubicación de las instalaciones y se basa en ellos para ofrecer a nuestro equipo de operaciones predicciones en tiempo real sobre las llegadas tardías.
En esencia, para predecir si un transportista llegará o no a tiempo a una instalación se necesitan tres ingredientes clave: (1) la ubicación de la instalación, (2) geocercas alrededor de la instalación que podamos utilizar para detectar cuándo un transportista ha llegado o salido de una instalación, y (3) un modelo que pueda hacer predicciones en tiempo real de la llegada tardía dada la ubicación de un transportista y la ubicación de la instalación. Como veremos en el siguiente ejemplo, si falla alguno de estos componentes, todo el sistema se viene abajo.

Figura 1: Dos camiones que se dirigen a la misma instalación (chincheta verde) generan distintos tipos de errores de seguimiento cuando el sistema tiene una ubicación imprecisa de la instalación (el círculo marrón, con geovalla de llegada de 1,5 millas y geovalla de salida de 6 millas).
En el caso del camión verde, no se activa ninguna de las dos geocercas, lo que significa que, según el sistema, el transportista nunca llegó a las instalaciones (aunque es posible que llegara a tiempo). En el caso del camión marrón, se activan ambas geocercas <mientras el transportista está en tránsito hacia la instalación real, lo que significa que el sistema registrará incorrectamente que el transportista ha llegado a la instalación a una hora incorrecta, registrará que el transportista ha pasado muy poco tiempo en la instalación (dado que el transportista en realidad sólo está conduciendo, esto se conoce como «defecto de permanencia»), y registrará que el transportista ha abandonado la instalación a una hora incorrecta. Para ambos camiones, cualquier predicción de llegada tardía realizada mientras estaban en tránsito no sería fiable, ya que el modelo estaría haciendo predicciones utilizando la <ubicación incorrecta de las instalaciones.
Este ejemplo motiva el planteamiento que adoptamos para construir nuestro sistema de seguimiento: perfeccionar los fundamentos (localización y geocercas) para construir un modelo de llegada tardía de alta calidad. A lo largo del proyecto, aprovechamos la gran cantidad de datos históricos de carga y seguimiento de que disponíamos.
Obtener datos de localización de las instalaciones de transporte parece sencillo, ¿verdad? Al fin y al cabo, son los camiones los que se mueven, no las instalaciones. Por desgracia, no es tan sencillo. Cuando revisamos los datos de ubicación de nuestras instalaciones al principio de nuestro proyecto, descubrimos que las ubicaciones que habíamos estado obteniendo de las empresas de navegación GPS heredadas eran con frecuencia incorrectas. En una muestra de 500 de las mayores instalaciones de nuestra red, aproximadamente el 40% tenían una ubicación GPS incorrecta, incluido un 10% de casos en los que la ubicación de la instalación estaba desviada en al menos 0,3 millas (lo más probable es que se correspondiera con el centro del código postal de la instalación). 0,3 millas puede no parecer un error considerable, pero para estas instalaciones, nuestros datos indicaron que ~24% de las cargas tenían horas de llegada/salida incorrectas registradas por el sistema.
Recurrimos a nuestros datos internos de seguimiento por GPS, que recopilamos a través de la aplicación móvil de transporte Uber Freight para miles de envíos diarios. La figura 2 ilustra nuestro planteamiento.

Figura 2: La ubicación de la instalación en el sistema (círculo rojo) es incorrecta; la ubicación correcta puede identificarse analizando la localización de los GPS de los transportistas que visitan la instalación.
De este ejemplo se desprende claramente que la ubicación de las instalaciones del sistema es incorrecta y que, en realidad, las instalaciones se encuentran cerca del grupo de pings de la parte superior derecha. Sin embargo, hacer este análisis manualmente para cada instalación simplemente no es factible dada la escala de nuestra red. En su lugar, creamos un modelo de aprendizaje automático para analizar nuestros datos GPS históricos e identificar grupos de pings asociados a instalaciones. Para garantizar la precisión del algoritmo, añadimos comprobaciones de sentido común, como distinguir entre los pings recibidos de transportistas que estaban en movimiento y los que estaban en reposo; descartar los grupos asociados a paradas de descanso, paradas para repostar y otras ubicaciones espurias; y descartar las señales GPS de los expedidores que no estaban realmente en tránsito.
Tras limpiar nuestros datos históricos de localización de instalaciones, ahora ejecutamos el algoritmo Pinpoint de forma recurrente para asegurarnos de que la localización de nuestras instalaciones está siempre actualizada y de que identificamos lo antes posible las ubicaciones de las nuevas instalaciones que se incorporan a nuestra red.
Como comentamos en el primer ejemplo, el sistema de seguimiento automatizado de Uber Freight (y muchos sistemas de seguimiento del sector del transporte de mercancías) utiliza geocercas para determinar la hora a la que un transportista llega a una instalación y sale de ella. Existen varios retos a la hora de trazar «buenas» geocercas:
Para hacer frente a estos retos, volvimos a recurrir a nuestros datos GPS internos de alta calidad. En el Proyecto Lasso desarrollamos un algoritmo que analiza cientos de miles de señales GPS para crear automáticamente geovallas a medida para nuestras instalaciones. Mientras que la geo-valla estándar es un círculo con un radio de 1,5 millas, hemos sido capaces de producir geo-vallas con radios tan pequeños como 0,1-0,3 millas alrededor de la instalación o del muelle de carga dentro de la instalación. Las figuras 3 y 4 muestran cómo convertimos los datos GPS en genfeces para diversas instalaciones.
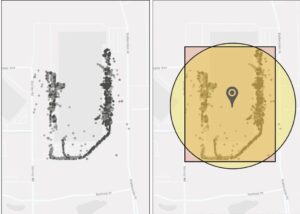
Figura 3: (Izquierda) Pings GPS brutos de los transportistas que visitan la instalación; (Derecha) Ubicación de la instalación y geovalla derivada automáticamente de los pings GPS.

Figura 4: Dos ubicaciones y geocercas diferentes identificadas en la misma instalación pero conectadas a distintos expedidores.
El proyecto Lasso ha ayudado a cargadores y transportistas a ahorrar tiempo reduciendo las disputas sobre las horas de llegada y salida. También hemos observado una reducción del 60% (relativo) en la fracción de cargas que presentan algún tipo de comportamiento obviamente incorrecto, es decir, defectos de permanencia en los que un transportista parece haber pasado < 15 minutos entre la llegada y la salida, y defectos de tránsito en los que el transportista parece haber viajado a más de 130 km/h de media entre dos paradas. Estas mejoras nos dan confianza en las horas de llegada y salida registradas en nuestro sistema.
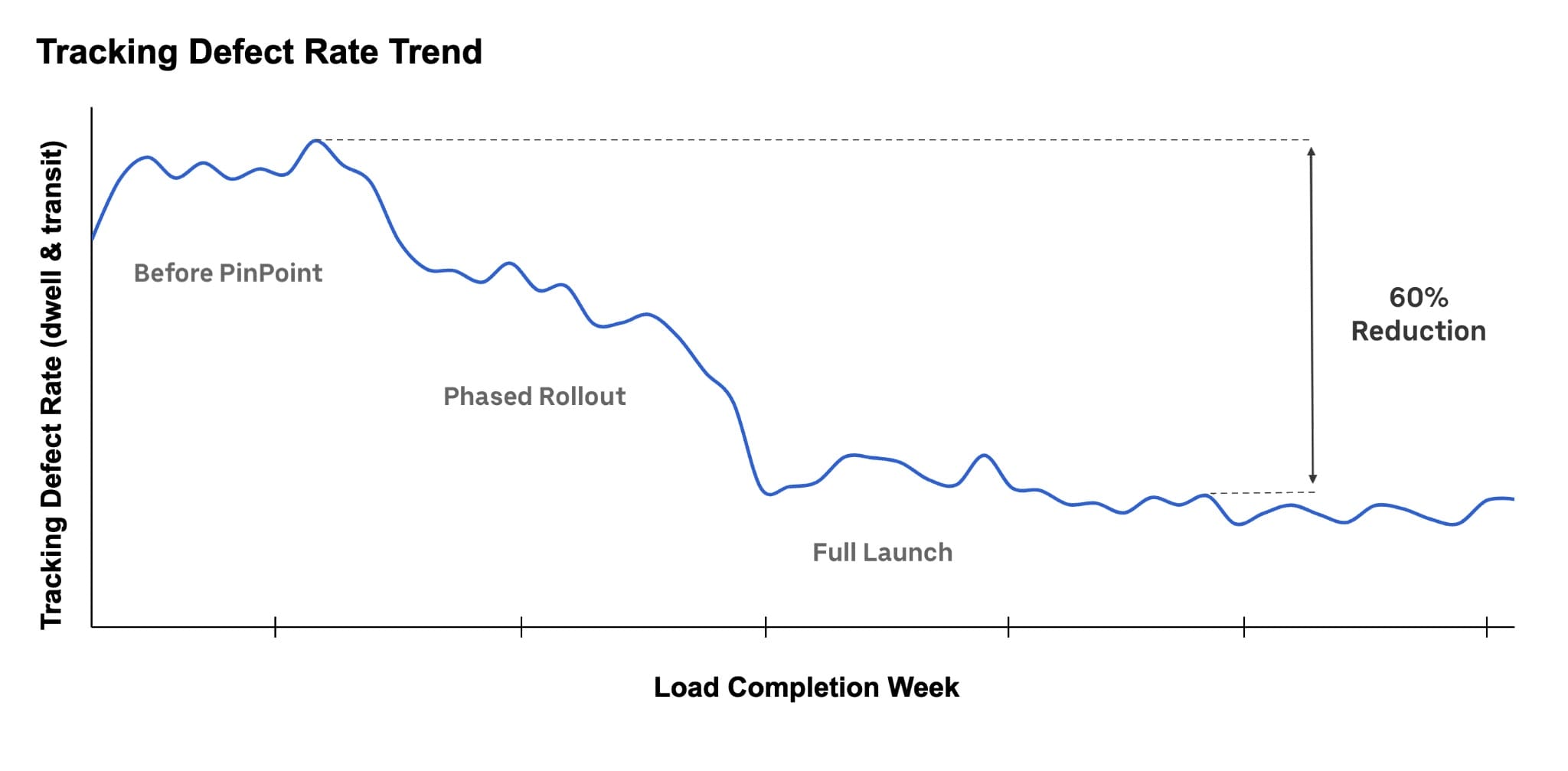
Figura 5: El proyecto Lasso consiguió una reducción sostenida del 60% (relativo) en las tasas de defectos de seguimiento tras su lanzamiento completo.
Tras afianzar los cimientos de nuestro sistema corrigiendo las ubicaciones de las instalaciones y construyendo geocercas a medida, estábamos listos para afrontar nuestro reto original: proporcionar predicciones de llegada tardía de alta calidad y en tiempo real a escala. Seguimos un proceso de cuatro pasos:
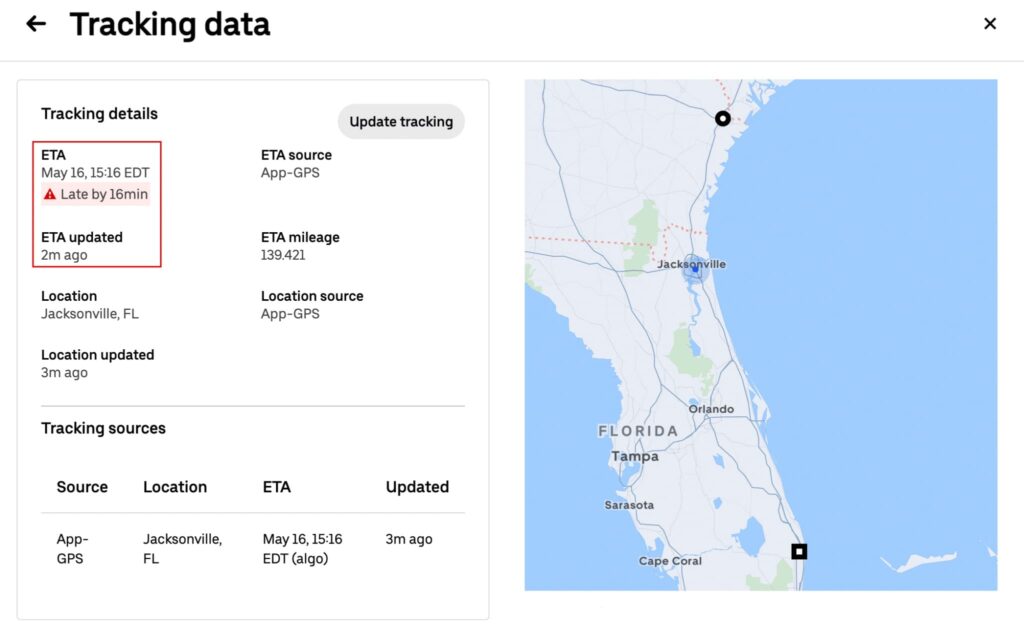
Con estas predicciones en la mano, nuestro equipo de operaciones puede centrar su atención en las cargas que es probable que lleguen tarde y tomar medidas paliativas, como ponerse en contacto con el transportista para comprobar la llegada, alertar al expedidor para que pueda ampliar o reprogramar la cita, o reasignar la carga a un transportista diferente (también conocido como «rebotar» la carga). Desde el lanzamiento del modelo de probabilidad de llegada tardía (PLA) en producción, hemos observado una mejora significativa tanto en nuestra capacidad para marcar cargas tardías como para detectar cargas rebotadas.
Consideramos que el proyecto de aprendizaje automático de las llegadas tardías que aquí comentamos es el primer paso de una ambiciosa hoja de ruta para mejorar los resultados del servicio a nuestros transportistas. Estamos trabajando activamente en un modelo de tiempo estimado de llegada (ETA) para acompañar a nuestro modelo PLA. Los modelos de ETA son omnipresentes en el sector minorista y de consumo (todos hemos utilizado una aplicación de navegación o hemos visto ETA para entregas de comida), pero la predicción de ETA para el transporte de mercancías plantea retos distintos. Por ejemplo, los viajes de transporte de mercancías suelen durar mucho más que los de reparto de comida o viajes compartidos, atraviesan múltiples zonas geográficas con diferentes condiciones de tráfico y meteorológicas, y se ven afectados tanto por la normativa sobre horas de servicio como por el comportamiento de los transportistas (por ejemplo, paradas para dormir, repostar, etc.).
Una vez implantados los modelos PLA y ETA, desarrollaremos flujos de trabajo automatizados de «autorreparación» para mejorar aún más el servicio a nuestros expedidores. Por ejemplo, podemos utilizar el modelo PLA para marcar las cargas con riesgo de llegar tarde a la recogida, luego utilizar los modelos ETA y PLA para identificar qué transportistas cercanos podrían recoger la carga a tiempo y, por último, preguntar automáticamente a los transportistas más prometedores si pueden intervenir para evitar una cita perdida. También estamos aprovechando las bases desarrolladas en el proyecto de llegadas tardías para ir más allá del seguimiento a nivel de carga para los cargadores. Por ejemplo, gracias a la mejora de los tiempos de llegada y salida generada por los proyectos Pinpoint y Lasso, hemos elaborado estimaciones mucho más precisas del tiempo que los transportistas pasan esperando en las instalaciones («tiempo de permanencia») y las hemos combinado con nuestros datos internos de calificación de transportistas para cuantificar el impacto de las instalaciones de los cargadores mal gestionadas en la satisfacción de los transportistas y, en última instancia, en los costes de los cargadores.


